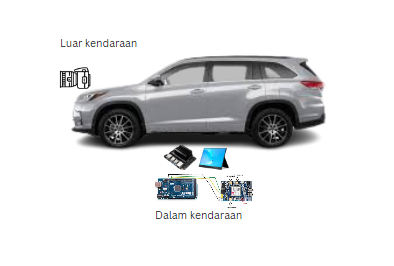
Deteksi lubang jalan merupakan kebutuhan yang sangat vital untuk perawatan dan manajemen kondisi jalan bagi pihak terkait. Penelitian ini bertujuan untuk mengembangkan sistem pendeteksian lubang jalan secara real-time menggunakan pendekatan pengolahan citra dan deep learning. Sistem ini dirancang untuk memberikan solusi efisien dalam perawatan dan manajemen kondisi jalan, dengan fokus pada deteksi lubang jalan secara otomatis. Arsitektur sistem yang terdapat pada Gambar 1 terdiri dari beberapa modul, yang utama adalah NVIDIA Jetson Nano sebagai pusat unit pemrosesan citra. Keputusan menggunakan Jetson Nano didasarkan pada keunggulannya sebagai Single Board Computer (SBC) berbasis GPU, memungkinkan tugas pemelajaran mesin dapat dijalankan dengan efisien. Modul GPS digunakan untuk mengakuisisi lokasi geografis dari lubang jalan yang terdeteksi, sementara LCD display digunakan untuk menampilkan informasi kepada pengguna. Proses deteksi lubang jalan diimplementasikan melalui teknik pengolahan citra dan deep learning.
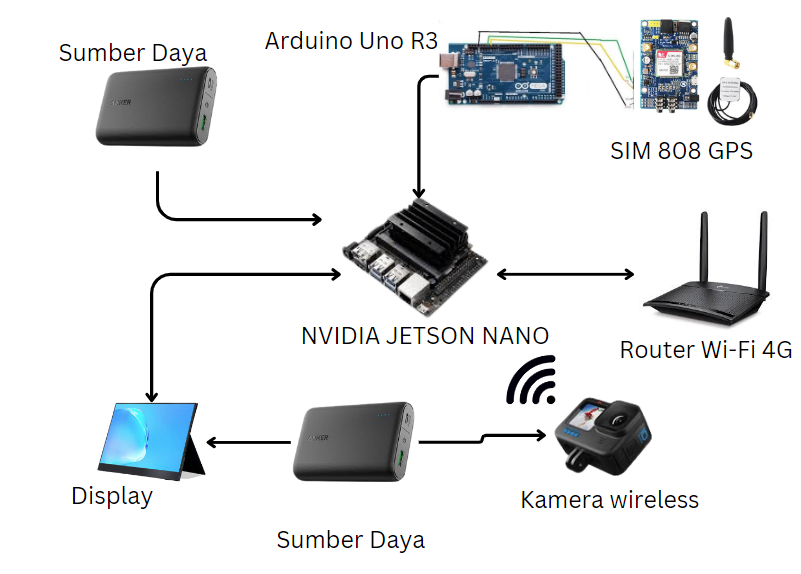
Arsitektur Sistem
Metode ini mencakup analisis citra menggunakan teknik-teknik seperti segmentasi berbasis threshold, deteksi tepi, dan filter Gabor. Selanjutnya, deep learning digunakan untuk meningkatkan tingkat akurasi deteksi. Model deep learning yang telah dilatih mampu mengenali pola-pola khusus yang berkaitan dengan lubang jalan pada citra.Sistem ini dirancang untuk diintegrasikan secara on-board pada kendaraan inspeksi jalan, memungkinkan pemeriksaan kondisi jalan secara real-time. Ketika lubang jalan terdeteksi, informasi lokasinya akan diakuisisi melalui modul GPS dan ditampilkan pada LCD display. Hal ini memudahkan operator untuk menandai lokasi lubang jalan dan merencanakan tindak lanjut perbaikan.
Mengimplementasikan sistem tertanam (embedded system) yang mampu mendeteksi dan mengakuisisi lokasi geografis lubang jalan menggunakan kamera on-board di atas kendaraan. Melakukan eksperimen pengujian performa dari sistem yang telah dibangun.