 - Bima Prihasto.png)
Parkir ilegal merupakan masalah yang semakin meningkat di berbagai kota, termasuk di Indonesia. Aktivitas ini tidak hanya mengganggu arus lalu lintas, tetapi juga dapat menimbulkan risiko keselamatan bagi pengguna jalan lainnya. Dalam konteks ini, penelitian yang dilakukan oleh Bima Prihasto dan rekan-rekannya berfokus pada pengembangan sistem deteksi objek untuk mengidentifikasi kendaraan yang diparkir secara ilegal dengan memanfaatkan teknologi terkini, yaitu metode You Only Look Once (YOLO) dan Optical Flow.
Latar Belakang
Menurut penelitian, pertumbuhan jumlah kendaraan di Indonesia tidak sebanding dengan lebar jalan yang tersedia. Hal ini menyebabkan banyak pengguna kendaraan terpaksa memarkir kendaraan mereka di tempat yang tidak seharusnya, seperti trotoar atau bahu jalan. Penegakan hukum yang lemah juga menjadi faktor penyebab maraknya parkir ilegal, di mana sering kali hanya diberikan peringatan tanpa sanksi yang tegas. Oleh karena itu, diperlukan solusi teknologi yang dapat membantu meningkatkan kesadaran dan kepatuhan masyarakat terhadap peraturan parkir.
Metodologi
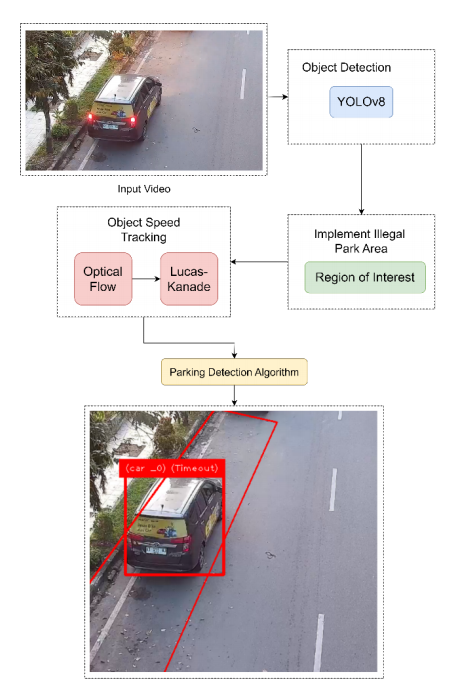
Penelitian ini menggabungkan dua metode utama: YOLO untuk deteksi objek dan Optical Flow untuk mengukur kecepatan kendaraan. YOLO adalah algoritma deteksi objek yang mampu melakukan deteksi secara real-time dengan membagi gambar menjadi grid dan mendeteksi objek dalam setiap sel grid tersebut. Sementara itu, Optical Flow digunakan untuk mendeteksi pergerakan objek antara dua frame berturut-turut, sehingga dapat melacak pergerakan kendaraan.
Proses penelitian dimulai dengan pengumpulan data dari berbagai sumber, termasuk platform Roboflow yang menyediakan gambar berbagai jenis kendaraan. Setelah itu, dilakukan proses pelabelan data untuk memastikan akurasi dalam analisis selanjutnya. YOLOv8 diintegrasikan ke dalam kerangka penelitian untuk meningkatkan kemampuan deteksi objek, dan OpenCV digunakan untuk membuat bounding box di area parkir ilegal.
Hasil dan Diskusi
Hasil penelitian menunjukkan bahwa kombinasi metode YOLO dan Optical Flow berhasil dalam mendeteksi kendaraan yang terlibat dalam parkir ilegal. Sistem ini dapat mengidentifikasi kendaraan yang tetap berada di area parkir ilegal melebihi waktu yang ditentukan. Dalam pengujian, model menunjukkan tingkat akurasi yang tinggi, dengan precision mencapai 98,9% dan recall 100%.
Namun, ada beberapa tantangan yang dihadapi, seperti kesulitan dalam mengenali ID spesifik kendaraan ketika YOLO mendeteksi objek, karena YOLO lebih fokus pada deteksi objek dan memproses setiap frame secara independen. Meskipun demikian, metode Lucas-Kanade dalam Optical Flow terbukti efektif dalam menghitung pergerakan objek, yang memungkinkan pengukuran kecepatan perpindahan piksel untuk setiap frame.
Kesimpulan
Penelitian ini memberikan kontribusi signifikan dalam pengembangan sistem deteksi parkir ilegal menggunakan teknologi canggih. Dengan memanfaatkan YOLO dan Optical Flow, sistem ini tidak hanya mampu mendeteksi kendaraan yang diparkir secara ilegal, tetapi juga melacak pergerakan kendaraan tersebut. Diharapkan, hasil penelitian ini dapat menjadi dasar untuk implementasi sistem pemantauan yang lebih efektif dalam penegakan hukum dan pengendalian parkir ilegal di ruang publik.
1. Deteksi Kendaraan Secara Real-Time: Metode YOLO memungkinkan sistem untuk mendeteksi kendaraan yang diparkir secara ilegal dalam waktu nyata, sehingga penegakan hukum dapat dilakukan dengan cepat.
2. Pelacakan Pergerakan Kendaraan: Optical Flow digunakan untuk melacak pergerakan kendaraan antara frame, membantu menentukan apakah kendaraan tetap berada di area parkir ilegal untuk waktu yang ditentukan.
3. Peningkatan Akurasi Deteksi: Kombinasi YOLO dan Optical Flow meningkatkan akurasi dalam mendeteksi kendaraan yang diparkir ilegal, mengurangi kemungkinan kesalahan deteksi.