
Penyandang tunanetra sering menghadapi tantangan signifikan dalam mobilitas sehari-hari akibat keterbatasan alat bantu yang tersedia. Meskipun tongkat atau alat bantu sejenis dapat memberikan dukungan dasar, kemampuan untuk mendeteksi dan mengenali objek di sekitar secara real-time masih sangat terbatas. Dengan kemajuan teknologi pengenalan objek berbasis citra yang didukung machine learning, terdapat peluang besar untuk menciptakan solusi inovatif. Namun, tantangan utama terletak pada implementasi teknologi ini dalam perangkat keras dengan kemampuan komputasi terbatas, seperti Single-board Computer (SBC). Penelitian ini bertujuan untuk mengembangkan HelmNaVis, sebuah sistem visual asistif berbasis helm, yang mengintegrasikan pengenalan objek-to-audio untuk meningkatkan kemandirian dan keselamatan penyandang tunanetra.

Penelitian ini dilakukan dalam dua tahap utama. Tahap pertama adalah pengembangan model deteksi objek berbasis YOLOv8n yang dioptimalkan untuk perangkat keras dengan kemampuan komputasi terbatas. Optimalisasi dilakukan dengan menerapkan ghost module, downsampling, dan mekanisme attention untuk menurunkan beban komputasi serta meningkatkan akurasi. Tahap kedua adalah pengembangan perangkat helm yang dinamakan TechSight Helm, yang mengintegrasikan modul ESP32-CAM, lima sensor ultrasonik RCWL-1601, dan Raspberry Pi 4 dalam topologi jaringan bintang. Sistem ini dirancang untuk mendeteksi objek dan halangan, memproses data visual dan sensorik, serta mengonversi informasi tersebut menjadi umpan balik audio menggunakan library Text-to-Speech.
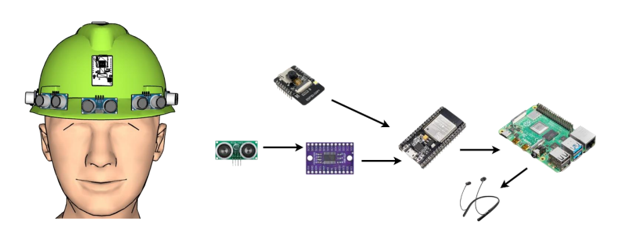
Gambar 2 Perancangan system dan Arsitektur Komunikasi antar Perangkat
Hasil pengujian menunjukkan bahwa model YOLOv8n yang dioptimalkan berhasil menurunkan beban komputasi dari 8.09 GFLOPS menjadi 1.77 GFLOPS, dengan waktu inferensi berkurang sebesar 57,6% dari 401,56 ms menjadi 170,33 ms. Integrasi attention mechanism juga meningkatkan performa model dengan kenaikan mAP sebesar 1,3%. Pada tahap implementasi perangkat, TechSight Helm yang menggunakan topologi jaringan bintang memiliki kecepatan pemrosesan rata-rata 8 milidetik, lebih unggul dibandingkan topologi bus. Sistem ini mampu mendeteksi dan mengklasifikasikan objek seperti meja, sofa, dan manusia dengan tingkat akurasi masing-masing 99,56%, 99,95%, dan 94,05%. Namun, tingkat akurasi yang lebih rendah pada objek tertentu, seperti kasur (49,40%), menunjukkan kebutuhan untuk pengembangan lebih lanjut.
HelmNaVis berhasil mengintegrasikan teknologi pengenalan objek-to-audio dalam sebuah perangkat helm yang efisien dan andal. Dengan memanfaatkan metode YOLOv8n yang dioptimalkan dan perangkat keras berbasis SBC, sistem ini mampu memberikan solusi inovatif untuk mobilitas tunanetra. Hasil penelitian ini menunjukkan potensi besar dalam meningkatkan kemandirian dan keselamatan penyandang tunanetra melalui teknologi berbasis small device. Implementasi lebih lanjut dapat difokuskan pada peningkatan akurasi untuk jenis objek tertentu serta pengujian dalam lingkungan yang lebih beragam
1. Analisis efektivitas penggunaan metode ghost module dan downsampling dalam mengurangi GFLOPS dari model YOLOv8n, agar memiliki waktu inference yang lebih sesuai dengan keterbatasan perangkat keras raspberry pi
2. Analisis efektivitas penggunaan metode attention mechanism dalam meningkatkan mAP dari model YOLOv8n, sehingga model dapat memberikan hasil yang lebih akurat dalam mendeteksi objek.
3. Penggunaan ESP32 DevKit V1, ESP32-CAM, dan Raspberry Pi 4 dalam topologi jaringan bintang memungkinkan sistem untuk mengoptimalkan penggunaan daya serta meningkatkan efisiensi sumber daya komputasi, yang pada gilirannya dapat memperpanjang masa pakai perangkat dan mempercepat pemrosesan data.
4. HelmNavis mengintegrasikan deteksi objek dan pengukuran jarak untuk memberikan peringatan dini terhadap objek atau hambatan di jarak dekat, sehingga meningkatkan keamanan dan kenyamanan dalam mobilitas sehari-hari.