Penelitian ini mengeksplorasi pengembangan pengendali PID yang dioptimalkan menggunakan Algoritma Optimasi Kupu-Kupu (BOA) untuk motor DC tanpa sikat (BLDC), yang merupakan komponen kunci dalam kendaraan listrik. Motor BLDC dipilih karena efisiensinya yang lebih tinggi dan kebutuhan perawatan yang lebih rendah dibandingkan motor DC berb sikat. Namun, tantangan terbesar adalah mencapai kontrol kecepatan yang akurat dan responsif.
Dalam penelitian ini, tim peneliti mengawali dengan pemodelan matematika dari motor BLDC dan sistem pengendali PID. Setelah model matematika terbentuk, dilakukan simulasi menggunakan MATLAB/Simulink untuk menyesuaikan dan mengoptimalkan parameter PID. Algoritma Optimasi Kupu-Kupu (BOA) diterapkan dalam proses optimasi ini. BOA, yang terinspirasi dari strategi foraging kupu-kupu, menawarkan pendekatan unik dalam pencarian solusi optimal, menggabungkan eksplorasi luas dan eksploitasi terfokus.
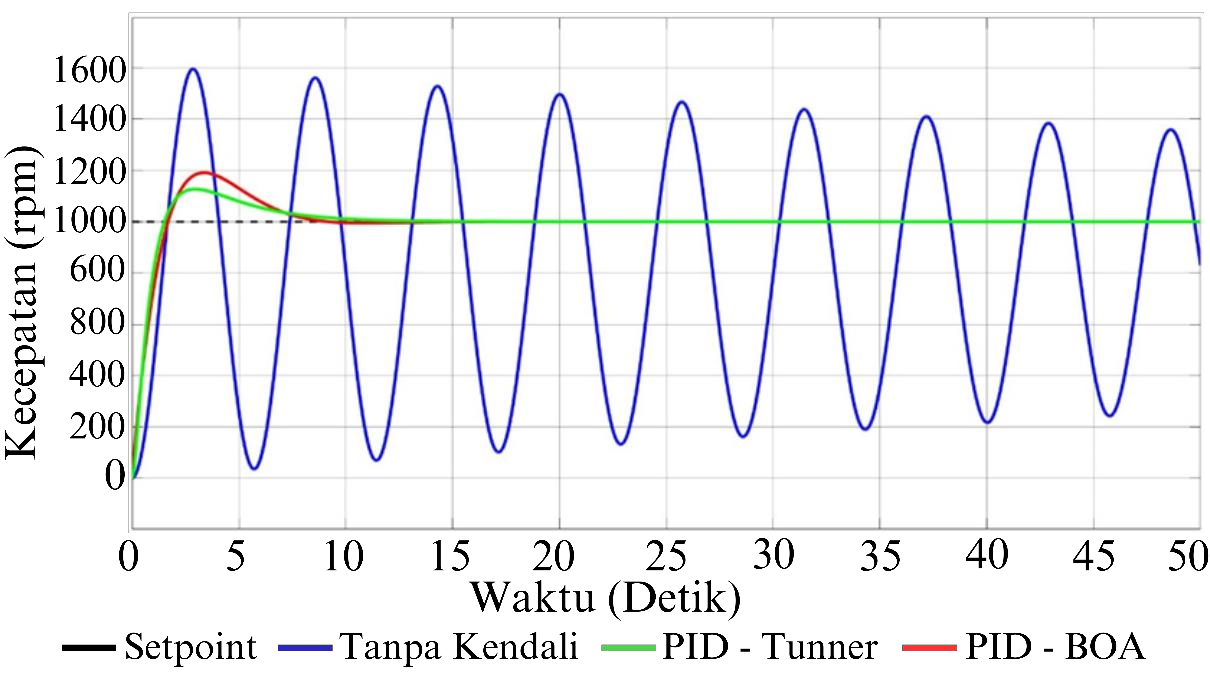
Berdasarkan hasil respon karakteristik yang telah didapatkan pada masing- masing metode yang dilakukan perbandingan pada setiap hasil yang didapatkan. Yang pertama dapat ditinjau pada Gambar 16, Nilai dari hasil simulasi pada sistem yang menggunakan metode tanpa kendali memiliki nilai overshoot yang sangat tinggi yakni 59.0386 %, berbeda dengan hasil yang ditunjukan menggunakan metode Tunner PID yang memiliki hasil 12.5257 % dan pada metode Butterfly Optimization Algorithm yakni 19.1127 %. Dari hasil tersebut metode Tunner PID yang dapat diunggulkan karena memiliki nilai overshoot yang lebih kecil dibandingkan metode lain. Selanjutnya pada hasil respon settling time pada ketiga metode yakni kendali PID- Butterfly Optimization Algorithm yang memiliki waktu lebih cepat yakni 7.7305 detik dengan selisih antara PID – Tunner sekitar 0.9265 detik. hal ini dikarenakan pada penggunaan Butterfly Optimization Algorithm dapat memperbaiki nilai settling time agar sistem dapat mencapai nilai steady state lebih cepat. Pada hasil respon terakhir yakni untuk nilai rise time dari seluruh metode waktu yang tercepat ditunjukan pada metode Tunner PID yakni 1.0604 detik yang memiliki selisih 0.2155 detik dengan metode Butterfly Optimization Algorithm.
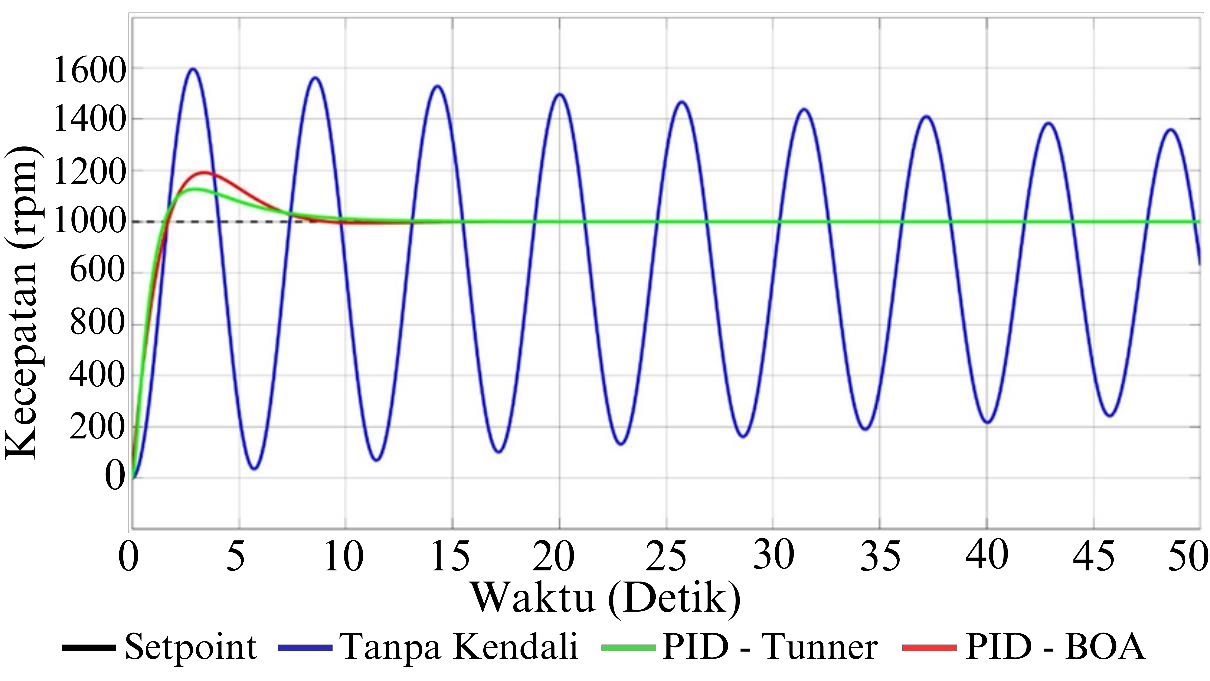
Gambar 1. Respon Karakteristik Seluruh Metode
Selanjutnya pada hasil implementasi dari ketiga metode yang digunakan untuk Motor BLDC diketahui dari kecepatan yang didapatkan pada setiap metode. Pada respon karakteristik menunjukan bahwa semua metode belum mencapai nilai steady state. Pada hasil steady state error nilai dari metode tanpa kedali memiliki keunggulan dibandingan dengan metode PID – Tunner dan PID - Butterfly Optimization Algorithm karena memiliki nilai error terkecil yakni 9.8 %, Selanjutnya pada nilai overshoot pada semua metode dapat dilihat bahwa PID – BOA memiliki nilai yang kecil dibandingkan metode lain yaitu 0.167 %. Dari hasil implementasi yang didapatkan metode tanpa kendali memiliki hasil yang lebih baik dibandingkan metode lain, karena mendapatkan hasil yang steady state atau stabil pada kecepatan 1097.87 rpm walaupun belum mencapai nilai setpoint yang diinginkan yakni 1000 rpm.
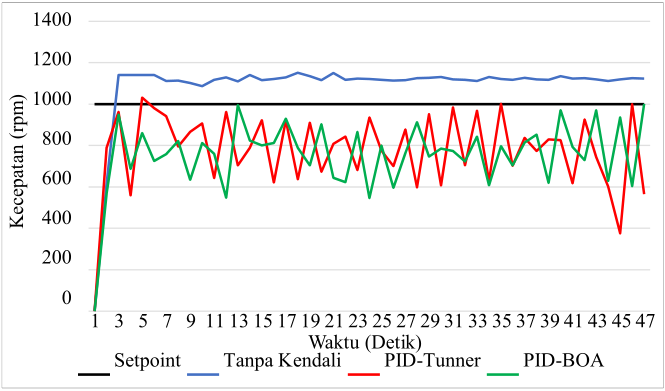
Gambar 2. Respon Kecepatan Dari Seluruh Metode
Selanjutnya motor BLDC akan menghasilkan torsi, dapat dilihat pada Gambar 18 respon torsi dari semua metode. Dari hasil torsi yang terbesar diantara semua metode ditunjukan pada PID-Tunner yakni 29.01 Nm dan arus yang masuk sebesar 1.64 A dan kecepatan yang terukur pada saat torsi pucak yakni 641.67 rpm. selanjutnya pada hasil torsi yang ditunjukan menggunakan metode Butterfly Optimization Algorithm memiliki torsi yang naik dan turun, dan untuk torsi puncak yang dihasilkan yakni sebesar 23.88 Nm dengan arus yang terukur 1.15 A, dan pada awal starting motor BLDC terjadi kenaikan torsi sebesar 22.82 Nm. Dan yang terakhir nilai torsi yang dihasilkan terkecil diantara metode lain yakni dengan tanpa kendali dengan nilai puncak atau maksimum dari torsi yakni 23.22 Nm.
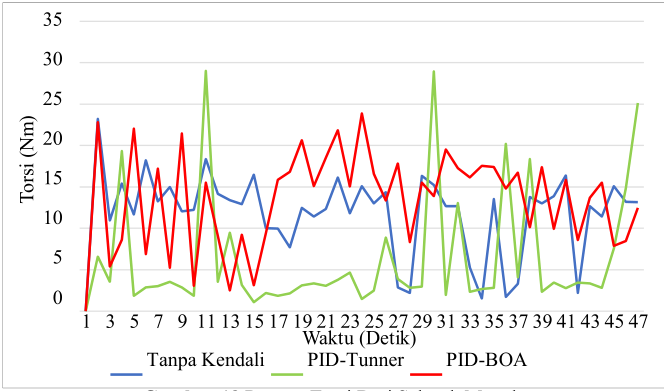
Gambar 3. Respon Torsi Dari Seluruh Metode
Dari hasil penelitian yang telah dilakukan dengan menggunakan sistem Motor BLDC secara simulasi maupun implementasi yaitu tingkat efektifitas yang didapatkan antara hasil simulasi dengan implementasi masih belum mendekati. Dapat dilihat dari respon kecepatan dan torsi yang telah didapatkan dari hasil implementasi bahwa metode tanpa kendali memiliki keunggulan dibandingan dengan menggunakan kendali PID.
1. Peningkatan Efisiensi Motor BLDC: Penggunaan algoritma optimasi kupu-kupu dalam pengendali PID menyediakan metode yang lebih efektif dalam mengatur kecepatan motor DC tanpa sikat, yang sangat penting untuk efisiensi kendaraan listrik.
2. Stabilitas Sistem Kontrol: Desain yang dioptimalkan menjamin stabilitas yang lebih tinggi dalam operasi motor, penting untuk kinerja kendaraan yang aman dan handal.
3. Inovasi dalam Teknik Kontrol: Penerapan Algoritma Optimasi Kupu-Kupu sebagai metode baru dalam pengendalian motor menyediakan wawasan berharga untuk riset lanjutan dalam teknik kontrol otomatis.
4. Kontribusi untuk Kendaraan Ramah Lingkungan: Dengan meningkatkan kinerja motor BLDC, penelitian ini memberikan kontribusi langsung terhadap pengembangan kendaraan listrik yang lebih efisien dan ramah lingkungan.
5. Pengembangan Akademis dan Industri: Hasil penelitian dapat diaplikasikan di industri serta menjadi topik pembelajaran penting dalam pendidikan teknik elektro dan teknik mesin.