
Penelitian - Umumnya pengukuran perpindahan posisi dilakukan dengan menggunakan rotary encoder. Penggunaan rotary encoder menghasilkan pengukuran perpindahan jarak yang teliti, akan tetapi penggunaan rotary encoder tidak lagi relevan untuk pengukuran pada media rambat yang berupa fluida. Untuk mengatasi masalah tersebut dibangunlah sebuah sistem odometri menggunakan sensor Inertial Measurement Unit (IMU) yang terdiri atas akselerometer, giroskop, dan magnetometer. Sistem yang dibangung menggunakan ketiga sensor tersebut dalam 3 axis untuk mendapatkan parameter pitch, roll, dan yaw, sehingga sistem odometri lebih tahan terhadap perubahan orientasi terhadap orientasi acuan. Besaran percepatan yang diukur oleh sensor IMU diestimasi dengan algoritma Kalman Filter untuk mendapatkan besar perpindahan posisi. Hasil pengukuran perpindahan posisi yang didapatkan memiliki tingkat akurasi mencapai 65%. Meskipun memiliki tingkat akurasi yang rendah, penggunaan sensor IMU memiliki peluang untuk menggantikan rotary encoder karena memiliki fleksibilitas yang lebih baik. Adapun grafik percepatan dan perpindahan posisi terhadap perpindahan sebenarnya dapat ditunjukkan melalui Gambar 1 dan Gambar 2.
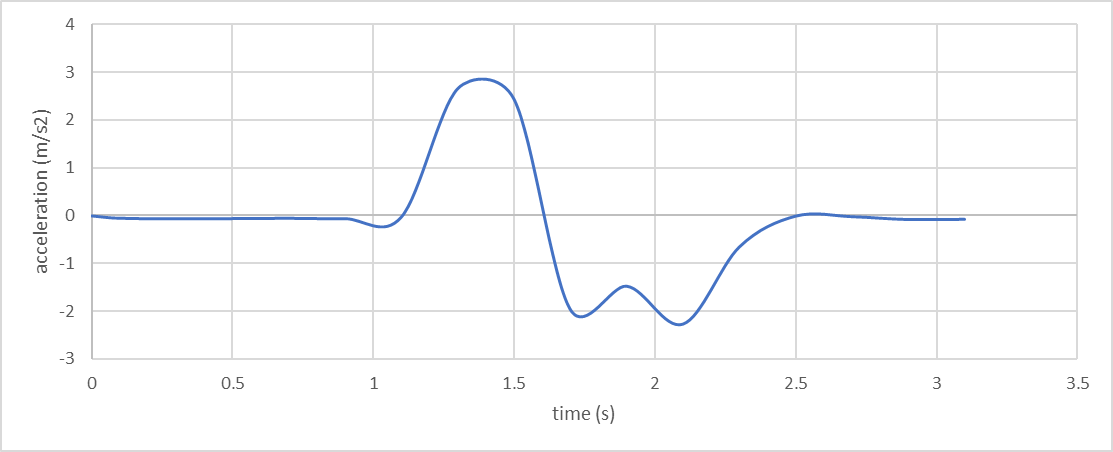
Gambar 1. Percepatan yang terukur oleh IMU dari objek yang bergerak
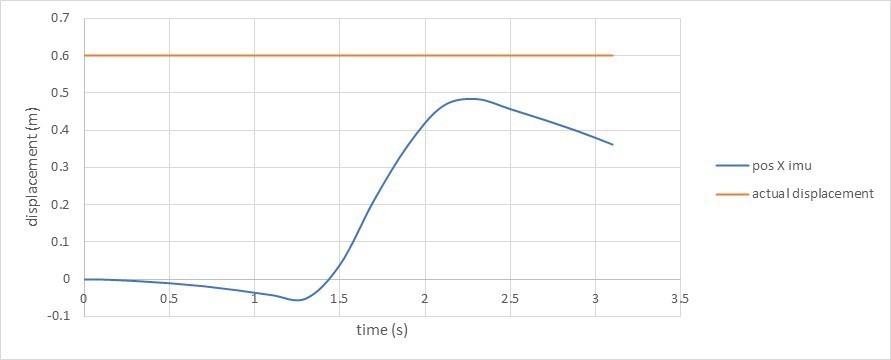
Gambar 2. Perpindahan posisi yang terukur.
LPPM - Institut Teknologi Kalimantan