
Penelitian - Hydrofoil Supported Catamaran (Hysucat) adalah salah satu jenis kapal hybrid yang menggabungkan konsep kapal hydrofoil dan kapal katamaran. Kapal ini memiliki hambatan yang lebih kecil dengan efisiensi daya mesin hingga 8% (Prastowo et al., 2016). Keunggulan lainnya adalah, dengan menggunakan tipe lambung katamaran, maka kapal hysucat menghasilkan luas geladak yang lebih besar sehingga dapat menyediakan kapasitas muatan yang lebih besar pula (Kos et al., 2010). Keunggulan kapal hysucat tersebut sesuai dengan karakterisktik kecepatan speedboat dan kapasitas muatan pada kapal tradisional klotok.
Akan tetapi, permasalahan yang sering ditemui pada kapal hysucat adalah pada saat kapal beroperasi di laut dangkal sebagaimana kebanyakan wilayah perairan di Kalimantan, dengan adanya hydrofoil yang dipasang pada kapal hysucat, tambahan aksesoris kapal tersebut akan rentan mengalami benturan dengan seabed (Lundin & Eriksson, 2021). Salah satu solusi dari permasalahaan tersebut ialah dengan penambahan retractable hydrofoil yang merupakan salah satu jenis foil yang dapat dilipat sedemikian rupa sehingga kapal dapat beroperasi pada mode displacement atau kondisi lambung kapal tercelup dan mode non-displacement atau kondisi lambung kapal terangkat dikarenakan adanya perbedaan tekanan yang bekerja pada foil (Wonggiawan et al., 2015). Namun saat kapal beroperasi pada mode displacement olah gerak kapal akan berbeda dengan mode non-displacement. Pada mode non-displacement, keberadaan hydrofoil dapat meningkatkan efek redaman pada saat kapal mengalami heaving dan pitching (Jaramillo, 2017).
Seakeeping kapal disimulasikan dengan menggunakan maxsurf motions pada kecepatan lifting 30 knot dengan variasi arah gelombang 90° (beam sea) dan 180° (head sea). Distribusi massa ditentukan pada 40% B dari roll gyradius sedangkan Pitch gyradius adalah 25% LoA. Metode strip theory telah memperhitungkan transom sedangkan added resistance menggunakan metode Salvesen (Salvesen, 1978). Gelombang ditentukan setinggi 1 meter yang tergolong slight wave pada sea state 3.
Selain menggunakan parameter RAO untuk membandingkan kemampuan olah gerak kapal, kriteria general operability limiting for fast small vessels (NORDFORSK, 1987) juga dijadikan parameter untuk batasan percepatan vertikal RMS (root mean square) pada FP dan gerak roll seperti disajikan pada tabel 1 di bawah ini.
Tabel 1 NORDFORSK Seakeeping Criteria for Fast Small Craft
|
Kriteria |
Nilai |
|
RMS Vertical Acceleration at FP |
0.65 g |
|
RMS of Roll |
4° |
Pada beam sea 90° diperoleh perbandingan RAO roll pada kapal displacement dan non-displacement seperti terlihat pada Gambar 1. Pada λ/L kecil sebesar 0.15, RAO untuk mode non-displacement cukup signifikan yaitu 6.4 dan merupakan puncak RAO pada berbagai variasi λ/L. Sedangkan pada kapal displacement, RAO tertinggi terjadi mulai dari λ/L 1.5 dengan nilai sekitar 1.0. Nilai RAO cenderung konstan sampai λ/L=3, sedangkan untuk λ/L yang lebih kecil, nilai RAO mode displacement jauh di bawah mode non-displacement. Walaupun pada kapal non-displacement λ/L kecil menunjukkan RAO yang besar, namun saat diperoleh λ/L=0,5 ke atas, RAO yang dihasilkan hampir sama dengan mode displacement, yaitu sekitar 1.0.
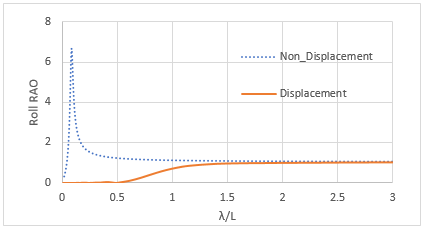
Gambar 1. RAO Roll pada beam sea 90°
Berdasarkan kriteria NORDFORSK 1978 untuk kapal kecil cepat, nilai perbandingan percepatan vertikal RMS pada FP dan gerak roll disajikan pada tabel 2. Nilai percepatan vertikal pada FP pada mode displacement dan non-displacement berturut-turut adalah 0,024 g dan 0,028 g, sedangkan gerak roll masing-masing adalah 1.16° dan 1.44°. Namun secara umum, semua kriteria yang dipersyaratkan telah terpenuhi sehingga dapat dikatakan layak untuk kenyamanan penumpang dan awak kapal.
Tabel 2. Respon gerak pada beam sea

Pada head sea 180°, perbandingan RAO heave pada mode displacement dan non-displacement diilustrasikan pada Gambar 2. Pada λ/L 1.4, heave RAO kapal non- displacement cukup signifikan yaitu 9.5 dan merupakan puncak dari RAO dalam variasi λ/L. Sedangkan pada mode displacement, nilai RAO tertinggi terjadi pada λ/L 4.0 dengan nilai 1.9, sedangkan RAO pada nilai λ/L yang lebih kecil, nilainya jauh di bawah kapal non-displacement. Meskipun mode non-displacement di λ/L kecil tidak menunjukkan RAO besar, akan tetapi ketika mendapatkan λ/L besar mulai dari 3, RAO yang dihasilkan lebih kecil daripada mode displacement hysucat.
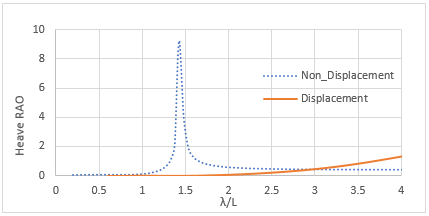
Gambar 2. RAO heave pada head sea 180°
Pada head sea 180°, perbandingan pitch RAO dalam mode displacement dan non-displacement ditunjukkan pada Gambar 3. Pada λ/L kecil yakni 1.4, RAO kapal non-displacement adalah sekitar 7.2 dan merupakan puncak pitch RAO dalam variasi λ/L. Sedangkan pada mode displacement, RAO pitch tertinggi terjadi pada λ/L 4.0 dengan nilai 1.9, sedangkan nilai λ/L yang lebih kecil jauh di bawah kapal non-displacement.
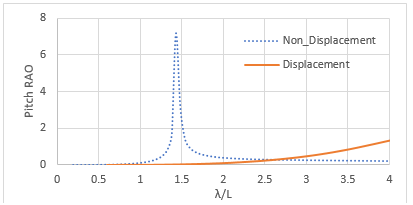
Gambar 3. RAO pitch pada head sea 180°
Selain itu, nilai perbandingan percepatan vertikal RMS pada FP disajikan pada tabel 3. Percepatan vertikal RMS pada titik FP pada mode displacement dan non-displacement berturut-turut adalah 0.18 g dan 0.54 g. Sama halnya dengan respon gerak pada gelombang beam sea, mode displacement hysucat menunjukkan respons kapal yang lebih baik daripada mode non- displacement. Akan tetapi, meskipun respon gerak yang dihasilkan lebih besar, mode non- displacement masih menunjukkan karakteristik yang layak dan memenuhi kriteria NORDFORSK.
Tabel 3. Respon gerak pada head sea

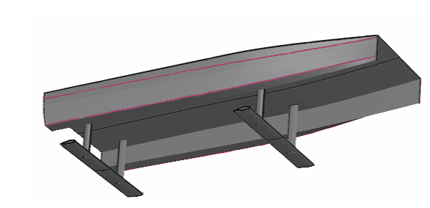
Desain Hysucat pada Displacement Mode
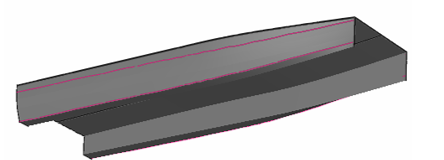
Desain Hysucat pada Non Displacement Mode
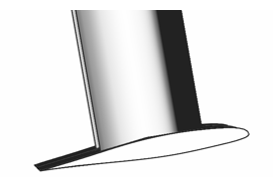
Hydrofoil NACA 64(1)212 dilengkapi dengan strut
LPPM - Institut Teknologi Kalimantan